空化射流清洁船体机器人
机器人本体技术指标:
1)尺寸:1800mm×1500mm×300mm;
2)重量:400Kg;
3)爬行速度:2-8m/min;
4)清洁能力:500-600m2/h。
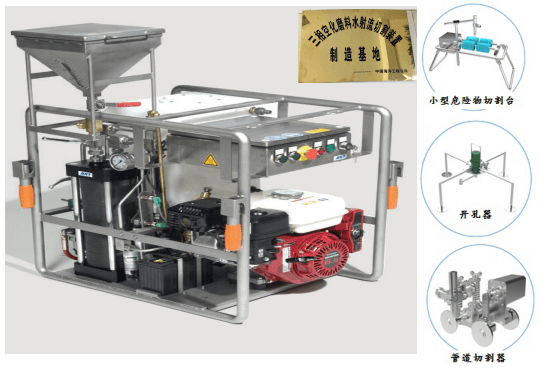
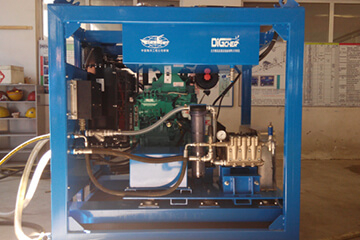
主机特点
-
 体积小重量轻,可便携移动1
体积小重量轻,可便携移动1 -
 结构紧凑坚固,系统维护方便2
结构紧凑坚固,系统维护方便2 -
 汽油机动力,满足野外作业需求3
汽油机动力,满足野外作业需求3 -
 工作压力仅为16-18MPa,操作简单安全4
工作压力仅为16-18MPa,操作简单安全4